Laufende und umgesetzte Projekte
Walkie-Talkies
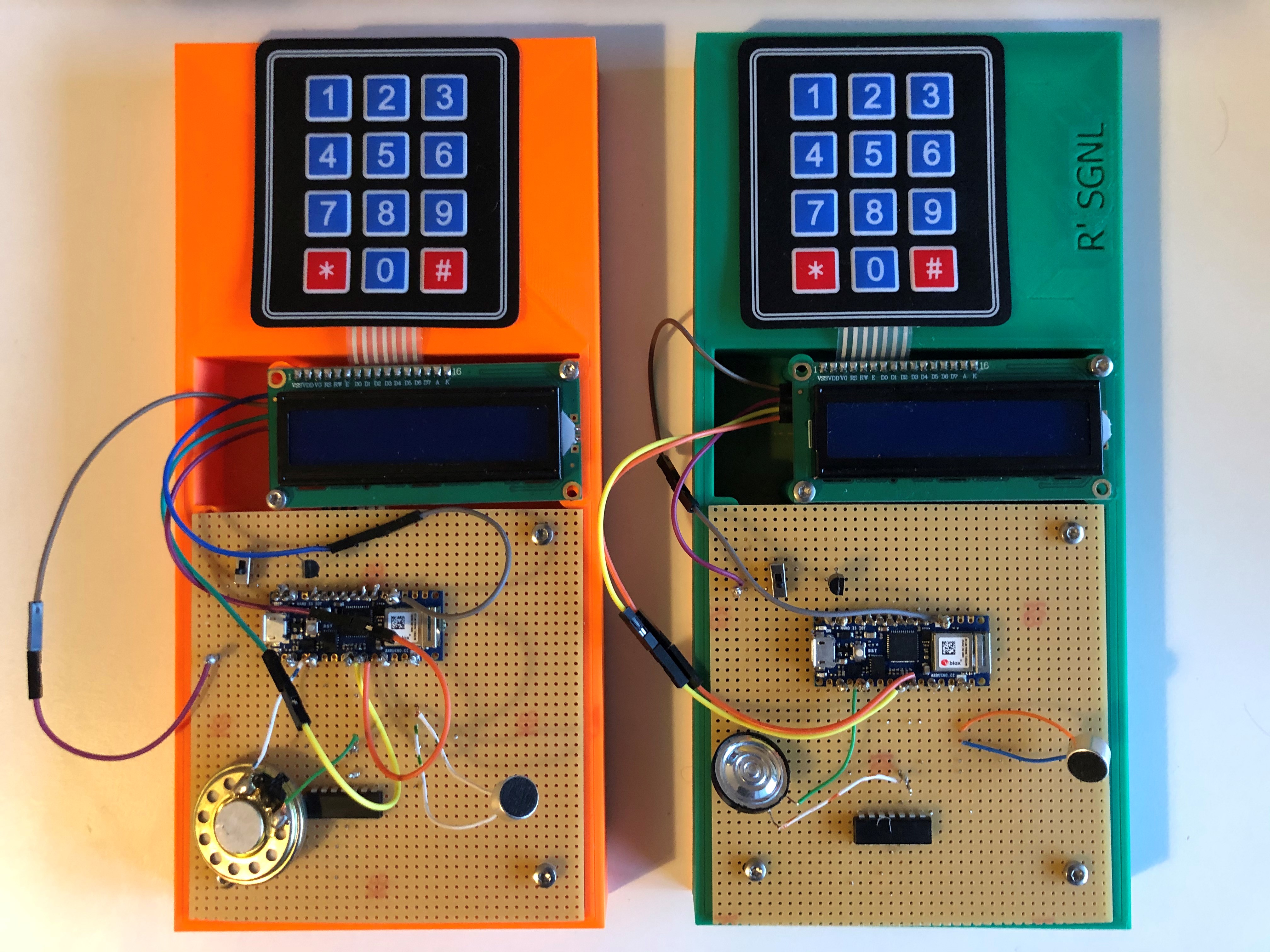
Als Projekt für die VU Computerunterstützte Experimente und Signalauswertung haben wir uns vorgenommen, ein Set Walkie-Talkies zu bauen. Aufgrund technischer Limitationen der Arduinos wurden es schließlich zwei Sensormodule mit Datenübertragung über Wifi. Für den dafür nötigen Aufbau wurden Geräte und Bauteile vom Elektronik-Arbeitsplatz verwendet.
Projekt:
Der Plan bestand aus zwei Geräten auf Arduino-Basis zur Übertragung von Temperaturdaten sowie Ton- und Textsignalen. Für diese Funktionen wurden folgende relevante Bauteile verwendet:
• Arduino Nano 33 IoT
• Mikrofon-Kapsel 1 - 10 V/DC, Frequenz-Bereich: 50 Hz - 20000 Hz
• 8 bzw. 50 Ohm Minilautsprecher
• 4x3 Membran-Tastatur
• 16x2 I2C-Display
• DS18S20 Temperatursensor
Weitere, für die Hauptfunktionen weniger relevante Bauteile wurden der Bauteilsammlung vom Philab entnommen.
Unter folgendem Link sind Schaltplan, Code und Beschreibung aller Funktionen abrufbar. Hier können alle Details zum Projekt nachgelesen werden.
https://www.dropbox.com/s/623xmb9c6vu6bu9/Funktionsbeschreibung%20und%20Datenblatt.pdf?dl=0
Bei weiteren Fragen zum Projekt hinterlasst uns gerne einen Kommentar oder kontaktiert uns persönlich.
Team Walkie Talkie:
Nadja Reisinger, Laura Kainz, Georg Wieland, Rafael Goldgruber und Simon Dampfhofer
E-Longboard
Ein E-Skateboard besteht vereinfacht aus folgenden Komponenten:
Longboard
Motor
Motorsteurung
Batterie
Das Longboard in diesem Fall wurde für einen Betrieb um die 40km/h ausgelegt und einer Reichweite von 30-50 km.
Batterie:
Die Batterie wurde vorgefertigt eingekauft mit einem Batterie-Management-System und Samsung 30Q Zellen. Diese Zellen sind im 18650 format (Zylinder) und werden mit Schweißpunkten zu einem Verband zusammengeschweißt. Hiermit kann man die Spannung(V) und Amperestunden (Ah) konfigurieren da eine einzelne Zelle 3,6V hat und 3Ah. Da es sich hierbei um zwei starke Motoren handelt (Peak 100A) kommt es zu Voltage sag, daher empfielt es sich eine Batterie zu nehmen welche mindestens 3 Zellen in Parallel geschaltet haben um dem entgegen zu wirken.
Einer 10s4p Konfiguration gewählt. https://eskating.eu/product/10s4p-eskating-electric-skateboard-battery-samsung-30q/
Motorsteuerung:
Zwei Wege können eingeschlagen werden.
ESC - Billig, eine Steuerung welche auch für elektrische Autos oder Flugzeuge verwendet wird
VESC - Teuer, Steurung die auf dem Betrieb eine ESC aufgebaut ist aber mit stärkeren Mosfets und Kondesatoren ausgestattet ist und ebenfalls rekuperieren kann
Es gibt in der E-Skateboard Szene ein weitverbreitetes Open-Source Projekt von Vedder, welche eine Software und Hardware Lösung anbietet. Die Hardware ist von der Schematic her von Hersteller zu Hersteller verschieden muss aber immer den selben zentrallen IC verwenden. Es wurden zwei VESCs eingekauft auf der Hardware Variante 4.12 auch bekant als FOCBOX. Diese Einheit hatte die Neuerung eingebracht nicht nur im BLDC sondern auch FOC Betrieb die Motoren anzusteuren. Der Unterschied verkürzt angesprochen BLDC steuert mit Rechteckstrom an, FOC steuert mit Sinusstrom die einzelnen Stränge an (https://electric-skateboard.builders/t/the-difference-between-motors-commutation-bldc-vs-foc-trapeziodal-sinosuidal/3002)
Motor:
Die Motoren wurden gebraucht eingekauft und im Philab Grunderneuert. Hierfür wurden Kugellager ausgetauscht und ein Magnet erneut eingesetzt. Entscheidung hier wurde für ein größt möglichen Umfang getroffen für mehr Drehmoment.
Longboard:
Longboard sammt Achsen und überdimensionierte Reifen wurden ebenfalls gebraucht eingekauft, diese konnten mit geringen Mitteln erneuert werden. Es mussten hier nur die Bushings (Dämpfungselemente) angepasst werden für ein steiferes Fahrverhalten geeignet für hohe Geschwindigkeiten.
restliche Elektronik:
Eine Plastik hülle (ABS) wurde eingekauft und demensprechende Löcher für Schalter und Anzeigen. In die Hülle wurde die Batterie mit Kleber eingelegt und die mit den Motorsteuerunger per XT90 Konnetktoren und Kabel verbunden. Die Verbindung zu den Motoren hin verläuft über 3 Phasen und als Rückführung kommt ein Signal von mehreren Hallsensoren für die Position.
Ebenfalls enthalten waren ein Bluetooth Modul für das Auslesen von Daten über Stromverbrauch, Peakleistung etc.
Die Steuerung an sich erfolgte über ein 2.4 Ghz Modul welchse sich ähnlich wie ein Modellautosteuerung verhält, und einer speziellen Fernbedienung für E-Skateboarding. Das Signal wurde über einen CAN Bus auf beider Motorsteuerungen verteilt.
Schematic